|
MSc Projects |
|
|
|
Delft University of Technology |
Down below you will find a collection of possible MSc projects. If you are interested in doing one of these or have some ideas in a project along similar lines please contact me.
MSc assignment Proposals
| Brake Squeal in Bicycle Disk Brakes Some
brake systems have the annoying habit of making a very
high pitched and loud
noise while braking, which is called ‘brake squeal’.
Such brake squeal is usually
caused by friction induced vibration. Some seminal
work on brake squeal in
bicycle rim brakes has been done by Robin Walhout [1]
and Jan Groenhuis [2]. We
like to extend that work towards bicycle disk brakes. |
  |
|
Adaptive speed control |
 |
| Early warning and crash detection in
cycling Modern e-bikes have sensors which are able to measure the forward speed, the angular speed and linear acceleration of the rear frame, the pedal torque support level, and the ambient temperature, at a sample rate of 2 seconds. A safety related question is: Can we use this sensor data to detect, at an early stage, the instability of a bicycle and can we detect if the cyclist has crashed? |
  |
| Bicycle load cases For the structural design of bicycles, it is crucial to have representative load cases. The current tests (HCF and ISO) are historically grown and often do not representative the experienced load cases during daily usage. A more realistic set of load cases could improve the design of bicycles. Modern e-bikes have sensors which are able to measure the forward speed, the angular speed and linear acceleration of the rear frame, the pedal torque support level, and the ambient temperature, at a sample rate of 2 seconds. With the help of IoT technology we would like to explore if these sensors can help to develop the load cases as they are experienced by our fleet. As a parallel step you can also think of a system which with the help of the sensors and the IoT can give information on the actual road quality like potholes and unevenness. |
  |
| Design Rules for Handling Qualities Together with the Royal Gazelle some work has been done to relate bicycle geometry and rider characteristics to handling qualities [1]. Gazelle likes to get more understanding in the effect parameter changes like wheelbase, trail, head angle and mass distribution on the handling qualities of a bicycle. In order to answer questions like: how can we create a better handling for speedpedelecs, or which geometry/layout fits best for a café-racer? Does the mass of the rider or the position of heavy luggage have a large influence on the handling qualities? Can we design for that? |
 |
| Bicycle Tire Characteristics With the novel Wobble tool Royal Gazelle is able to predict possible shimmy behavior for a bicycle from the drawing board. An important and influential parameter in this Wobble tool is the bicycle tire at hand. Unfortunately, little is known about the mechanical characteristics like cornering and camber stiffness of bicycle tires. Tire manufacturers do not report these values for specific tire, often because they are just unknown. For the Royal Gazelle, to make a good choice in which tires to mount on their specific bicycle, there is a need for more insight in these tire characteristics in close connection with the tire manufacturer. |
 |
| Welke krachten op het voorwiel
hebben ernstige balansverstoring tot gevolg bij een
fiets? Een fiets is een balansvoertuig en bij ongevallen bij fietsen is een verstoring van de balans, gevolgd door een val en bekende toedracht. De oorzaken kunnen divers zijn zoals het met het voorwiel (heel even) raken van een voorganger of het zijdelings raken van een opstaande rand in het wegdek. Er is geen kwantitatief empirisch onderzoek bekend naar de gevoeligheid van de balans van een fiets voor externe krachten die op het voorwiel worden uitgeoefend. Verondersteld wordt dat een kleine verstoring van de stuurinrichting van een fiets door bijvoorbeeld een kleine laterale kracht voor de fietsbalans desastreuze gevolgen heeft. Het beoogde onderzoek betreft experimenteel empirisch onderzoek naar verstoringen van de fietsbalans door het gecontroleerd uitoefenen van krachten op het voorwiel van een fiets (zonder berijder). |
  |
| Bicycle
Geometry, Dynamics, and Handling; why do some bicycles feel different than others? At the Royal Gazelle
bicycle factory there is a vast amount of knowledge
about the relation between bicycle geometry and
handling. This knowledge is based on experience, and
with this experience new bicycles are designed in an
evolutionary manner. Academic research on bicycle
dynamics and control (handling) has created
theoretical knowledge on dynamics and control for
bicycles [1,2]. There is a wish to make a connection
between the two, by classifying geometry designs as
used by Gazelle in a standard manner and relate them
to the dynamical behavior as predicted by the recent
theoretical bicycle models [2]. This could lead to a
revolution in bicycle design. |
 |
| Active
stability control for a bicycle
The objective of the proposed
MSc assignment is: |
 |
|
|
|
| Modeling
shimmy in strollers
Shimmy is
a recurring problem in all of our strollers. |
 |

Model Order Reduction for coupled ship hydrodynamic and multibody dynamic equations
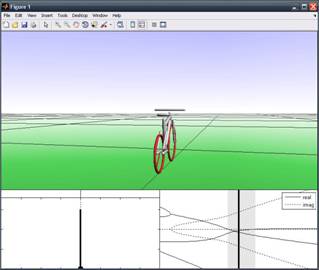
A musculoskeletal bicycle rider model
Haptic steer for a desktop bicycle simulator.
Modelleren van onderwater pijpleiding dynamica tijdens het offshore pijpenleggen
Simplest Skater Model of the corner
Structural impact analysis of a lightweight foldable tail structure
Detailed info and finished projects:
| A
musculoskeletal bicycle rider model
With the Whipple model of the uncontrolled bicycle now well established the question remains how do people control the mostly laterally unstable bicycle? One promising direction is adding a minimal musculoskeletal rider model to the Whipple model. With this rider model one could drive and stabilize the bicycle. Assignment: Add a minimal (few
extra degrees of freedom) musculoskeletal model to the
Whipple bicycle model and add a control strategy such
that the bicycle is laterally stabilized and
driven by the pedal forces resulting from muscle
forces. Investigate the robustness of the control by
adding longitudinal and lateral perturbations (a hill
and side wind). Think of a way to quantify the
handling quality by f.i. looking at the control
effort. |
 + +
= |
| Bicycle tire testing
Contrary to cars and motorcycles, little is known about bicycle tires. There is some knowledge on rolling resistance but an experimentally validated model for the lateral tire forces generated by the tire is unknown. Such a model is absolutely necessary to be able to predict the handling of bicycles in various extreme situations. Currently a bicycle tire testrig is under development (see picture) for testing tire characteristics on the large drum tire tester which is available in the TU Delft lab. Assigment: Finish the
design and construction of the bicycle tire testrig.
Measure lateral tire characteristics (side force,
alignment torque versus slip angle and camber angle)
for a number of different bicycle tire-wheel
combinations. Develop a simplified bicycle tire
model (like a brush model), determine the bicycle
parameters from the tests and see how the rest of the
measured data fits the model predictions. |
|
| Simplest
Skater Model – Optimal skating technique for
champions To move forward one has to push backwards. In skating one pushes sideways. By means of a simple mechanical model we would like to predict the optimal skate technique. This model should also be able to predict the optimal shape of the skate blade in order to apply this optimal technique. |
|
| Haptic steer
for a desktop bicycle simulator.
Design,
build, and test a bicycle handle bar with torque
feedback which can be used as an input device for the
simple bicycle desktop simulator.The candidate will
start by studying the literature on bicycle dynamics,
and driving simulators with haptic feedback. Next,
design a haptic steer for torque input with torque
feedback and finally test the device on various groups
of bicycle riders (novice, experienced,
elderly). |
|
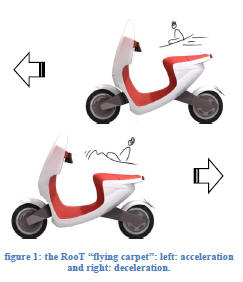
| Design of
the steering mechanism for the RooT electric scooter The RooT is an electric scooter designed to create a new user experience that enhances the advantages of electric mobility: it is quiet, clean and intuitive. It moves with you like a “flying carpet”. To create this feeling a new innovative mechanism is introduced which tilts forward when accelerating and tilt backward when braking (figure 1). It does so by means of a bar-mechanism suspension which tilts to the appropriate angle using the momentum of scooter and driver, in other words without the use of actuators. Assignment: Combine the tilting mechanism with a steering solution |
 |
|
Bicycle Dynamics and
Control |
 |
| Modelleren van
onderwater pijpleiding dynamica tijdens het offshore
pijpenleggen
Door de stijgende vraag naar onderwater pijpleidingen wordt er continu onderzoek gedaan naar het verbeteren van de mogelijkheden om deze leidingen op de zeebodem te kunnen leggen. De dynamica van de te leggen pijp, die vanaf een schip, door het zeewater op de zeebodem rust, speelt hierin een cruciale rol. De focus van dit onderzoek is het analyseren van het dynamisch gedrag van de onderwater pijp. De pijp wordt door zijn omgeving beïnvloed: Tijdens het pijpenleggen is er een continu samenspel tussen de pijp, het water (de hydromechanica) en het schip wat gevolgen heeft voor het gedrag van de pijp.
|
 |
| Steer-by-wire Bicycle Recently a prototype of a steer-by-wire scooter was developed at the TU Delft faculty of IO. Both the control algorithm and the mechanical design of the steer-by-wire system were sub-optimal, making the scooter difficult to control. Among other things, the steer actuator design prohibited the front wheel from freely rotating about the steering axis, thereby preventing the possibility of the machine showing any form of dynamic selfstability. The bicycle dynamics lab is interested in equipping a bicycle with a steer-by-wire system to create a variable stability bicycle. This variable stability bicycle can then be used to do all kinds of bicycle handling quality experiments. The desired steer-by-wire system replaces the mechanical connection of the handlebars with the front wheel by sensors and actuators. The system should be capable of actuating the steer and the handle bars (feedback torque) given the measured state of the complete bicycle system. The underlying control model is then based on the linearized equations of motion of the bicycle together with a stabilizing or destabilizing controller.
|
 |
|
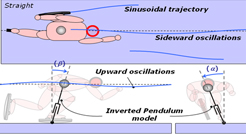
Simplest Skater Model of the corner To move forward, a skater pushes sideward. The skater balances on a thin sharp edge at speeds over 60 km/hr. In cornering, skaters constantly lean towards the center of the corner thereby resisting centrifugal forces. Changing the direction of motion costs effrot, but still skaters manage to accelerate during the corners. In fact, the corners are becoming more and more important in competitions and skaters tend to elongate the corner as much as possible.Recently a dynamical model of a skater was developed and validated for the straights. Such a dynamical model gives valuable insights in skating technique of individual strokes. What is the simplest skating model able to investigate optimal skate technique in the corners?Compare measured skate motion with model results. In what sense isthe motion optimal? |
 |
|
|
|